Metode akustik merupakan proses-proses pendeteksian target di laut dengan mempertimbangkan proses-proses perambatan suara; karakteristik suara (frekuensi, pulsa, intensitas); faktor lingkungan / medium; kondisi target dan lainnya. Aplikasi metode ini dibagi menjadi 2, yaitu sistem akustik pasif dan sistem akustik aktif.
Salah satu aplikasi dari sistem aplikasi aktif yaitu Sonar yang digunakan untuk penentuan batimetri. Sonar (Sound Navigation And Ranging): Berupa sinyal akustik yang diemisikan dan refleksi yang diterima dari objek dalam air (seperti ikan atau kapal selam) atau dari dasar laut. Bila gelombang akustik bergerak vertikal ke dasar laut dan kembali, waktu yang diperlukan digunakan untuk mengukur kedalaman air, jika c juga diketahui (dari pengukuran langsung atau dari data temperatur, salinitas dan tekanan). Ini adalah prinsip echo-sounder yang sekarang umum digunakan oleh kapal-kapal sebagai bantuan navigasi. Echo-sounder komersil mempunyai lebar sinar 30-45o vertikal tetapi untuk aplikasi khusus (seperti pelacakan ikan atau kapal selam atau studi lanjut dasar laut) lebar sinar yang digunakan kurang 5o dan arahnya dapat divariasikan. Walaupun menunjukkan pengaruh temperatur, salinitas dan tekanan pada laju bunyi dalam air laut (1500 ms-1) relatif kecil dan sedikit perubahan pada c dapat menyebabkan kesalahan pengukuran kedalaman dan kesalahan sudut akan menambah keburukan resolusi.
Teknik echo-sounding untuk menentukan kedalaman dan pemetaan dasar laut bertambah maju dengan berkembangnya peralatan sonar seperti SeaBeam dan Hydrosweep yang merupakan sistem echo-sounding multi-beam yang menentukan kedalaman air di sepanjang swath lantai laut di bawah kapal penarik, menghasilkan peta-peta batimetri yang sangat detail. Sidescan imaging system, sperti GLORIA (Geological Long Range Inclined Asdic), SeaMARC, dan TOBI (Towed Oceand Bottom Instrument) menghasilkan fotografi aerial yang sama atau citra-citra radar, menggunakan bunyi atau microwave. Echo-sounding banyak juga digunakan oleh nelayan karena ikan menghasilkan echo, dan kawanan ikan atau hewan lain dapat dikenali sebagai lapisan-lapisan sebaran dalam kolom air (Supangat, 2003).
Echosounder itu sendiri itu?
Echosounder adalah alat untuk mengukur kedalaman air dengan mengirimkan tekanan gelombang dari permukaan ke dasar air dan dicatat waktunya sampai echo kembali dari dasar air.
Adapun kegunaan dasar dari echosounder yaitu menentukan kedalaman suatu perairan dengan mengirimkan tekanan gelombang dari permukaan ke dasar air dan dicatat waktunya sampai echo kembali dari dasar air. Data tampilan juga dapat dikombinasikan dengan koordinat global berdasarkan sinyal dari satelit GPS yang ada dengan memasang antena GPS (jika fitur GPS pada echosounder ada).
Teknik echo sounder yang dipakai untuk mengukur kedalaman laut, bisa dibuat alat pengukur jarak dengan ultra sonic. Pengukur jarak ini memakai rangkaian yang sama dengan Jam Digital dalam artikel yang lalu, ditambah dengan rangkaian pemancar dan penerima Ultra Sonic.

Hydrographic Echosounder
Prinsip kerja echo sounder untuk pengukuran jarak digambarkan dalam Gambar 1. Pulsa Ultrasonic, yang merupakan sinyal ultrasonic dengan frekwensi lebih kurang 41 KHz sebanyak 12 periode, dikirimkan dari pemancar Ultrasonic. Ketika pulsa mengenai benda penghalang, pulsa ini dipantulkan, dan diterima kembali oleh penerima Ultrasonic. Dengan mengukur selang waktu antara saat pulsa dikirim dan pulsa pantul diterima, jarak antara alat pengukur dan benda penghalang bisa dihitung.
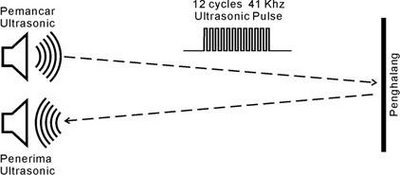
Gambar 1 Prinsip Echo Sounder
Adapun rangkaian Jam Digital yang digunakan titik desimal pada tampilan satuan dinyalakan dengan tahanan R8. Setiap kali tombol Start ditekan, AT89C2051 membangkitkan pulsa ultrasonic pada Pin P3.4 yang dipancarkan, selanjutnya lewat pin P3.5 yang terhubung ke rangkaian penerima ultrasonic, sambil mengukur selang waktu AT89C2051 memantau datangnya pulsa pantul. Hasil pengukuran waktu itu, dengan sedikit perhitungan matematis ditampilkan di system penampil 7 ruas sebagai besaran jarak, dengan satuan centimeter dan 1 angka dibelakang titik desimal.
Processor memerlukan waktu untuk melaksanakan instruksi. Bagi AT89C2051 yang bekerja pada frekuensi 12 MHz, instruksi NOP (baris 4 sampai 12); instruksi CPL (baris13) dilaksanakan dalam waktu 1 mikro detik, dan 2 mikro detik untuk melaksanakan instruksi DJNZ (baris 14). Dengan demikian waktu yang diperlukan untuk melaksanakan instruksi-instruksi di baris 3 sampai 13 adalah 12 mikro detik.
Di baris 12, nilai Ultra_Out (= pin P3.4) dibalik, kalau semula Ultra_Out bernilai 0 setelah instruksi ini dijalankan Utltra_Out akan bernilai 1, dan sebaliknya kalau semula 1 dan berbalik menjadi 0. Di baris 13 nilai R7 dikurangi 1, selama R7 belum mencapai 0 AT89C2051 akan mengulang lagi baris 2 dan seterusnya. Di baris 1 R7 diberi nilai 24, dengan demikian baris 2 sampai 13 akan diulang sebanyak 24 kali, dan selama itu pin 3.4 akan berbalik dari 0 ke 1 dan 0 kembali sebanyak 12 kali. Dengan demikian, hasil kerja Potongan Program 1 adalah pulsa ultrasonic12 gelombang dengan frekuensi 1/24 mikrodetik = 41666 Hz.
SINGLE-BEAM ECHOSOUNDER
Single-beam echo sounder merupakan alat ukur kedalaman air yang menggunakan pancaran tunggal sebagai pengirim dan penerima sinyal gelombang suara. Sistem batimetri dengan menggunakan single beam secara umum mempunyai susunan : transciever (tranducer/reciever) yang terpasang pada lambung kapal atau sisi bantalan pada kapal. Sistem ini mengukur kedalaman air secara langsung dari kapal penyelidikan. Transciever yang terpasang pada lambung kapal mengirimkan pulsa akustik dengan frekuensi tinggi yang terkandung dalam beam (gelombang suara) secara langsung menyusuri bawah kolom air. Energi akustik memantulkan sampai dasar laut dari kapal dan diterima kembali oleh tranciever.
Transciever terdiri dari sebuah transmitter yan mempunyai fungsi sebagai pengontrol panjang gelombang pulsa yang dipancarkan dan menyediakan tenaga elektris untuk besar frekuensi yang diberikan. Transmitter ini menerima secara berulang-ulang dlam kecepatan yang tinggi, sampai pada orde kecepatan milisekon. Perekaman kedalaman air secara berkesinambungan dari bawah kapal menghasilkan ukuran kedalamn beresolusi tinggi sepanjang lajur yang disurvei. Informasi tambahan seperti heave (gerakan naik-turunnya kapal yang disebabkan oleh gaya pengaruh air laut), pitch (gerakan kapal ke arah depan (mengangguk) berpusat di titik tengah kapal), dan roll (gerakan kapal ke arah sisi-sisinya (lambung kapal) atau pada sumbu memanjang) dari sebuah kapal dapat diukur oleh sebuah alat dengan nama Motion Reference Unit (MRU), yang juga digunakan untuk koreksi posisi pengukuran kedalaman selam proses berlangsung.
Range frekuensi yang dipakai pada sistem ini menurut WHSC Sea-floor Mapping Group mengoperasikan range frekuensi dari 3.5 kHz sampai 200 kHz. Single-beam echosounders relatif mudah untuk digunakan, tetapi alat ini hanya menyediakan informasi kedalaman sepanjang garis trak yang dilalui oleh kapal. Jadi, ada feature yang tidak terekam antara lajur per lajur sebagai garis traking perekaman, yang mana ada ruang sekitar 10 sampai 100 meter yang tidak terlihat oleh sistem ini.
MULTI-BEAM ECHOSOUNDER
Multi-Beam Echosounder merupakan alat untuk menentukan kedalaman air dengan cakupan area dasar laut yang luas. Prinsip operasi alat ini secara umum adalah berdasar pada pancaran pulsa yang dipancarkan secara langsung ke arah dasar laut dan setalah itu energi akustik dipantulkan kembali dari dasar laut (sea bed), beberapa pancaran suara (beam) secara elektronis terbentuk menggunakan teknik pemrosesan sinyal sehingga diketahui sudut beam. Dua arah waktu penjalaran antara pengiriman dan penerimaan dihitung dengan algoritma pendeteksian terhadap dasar laut tersebut. Dengan mengaplikasikan penjejakan sinar, sistem ini dapat menentukan kedalaman dan jarak transveral terhadap pusat area liputan. Multi-Beam Echosounder dapat menghasilkan data batimetri dengan resolusi tinggi ( 0,1 m akurasi vertikal dan kurang dari 1 m akurasi horisontalnya).

Penggunaan teknologi ini sangat membantu dalam pencarian sumberdaya ikan yang baru, sehingga akan mempercepat pengambilan keputusan atau kebijakan, terutama untuk menetapkan daerah penangkapan ikan agar potensi ikan dapat dipertahankan (Riani, 1998).
Cara Pemakaian :
- Memasang alat dan cek keadaan alat sebelum memulai pengambilan data.
- Pastikan kabel single beam dan display sudah terpasang.
- Pasang antena, jika diperlukan input satelit GPS.
- Masukkan single beam kedalam air.
- Set Skala kedalaman yang ditampilkan display.
- Set frekuensi yang akan digunakan 200 Hz untuk laut dangkal atau 50 Hz untuk laut dalam atau dual untuk menggunakan keduanya.
- Set input data air yaitu salinitas, temperatur dan tekanan air.
- Pengambilan data.
Pengolahan Data :
Perhitungan kedalaman diperoleh dari setengah waktu pemantulan signal dari echosounder memantul ke dasar laut kemudian kembali ke echosounder. Nilai waktu yang diperoleh di konversikan dengan kecepatan gelombang suara di dalam air.
Untuk data kedalaman yang lebih tepat, dimasukkan pula data-data temperatur air, salinitas air dan tekanan air. Hal ini diperlukan untuk memperoleh konversi yang tepat pada cepat rambat suara di dalam air.
Berikut adalah perhitungannya :
c = 1448.6 + 4.618T2 − 0.0523 + 1.25 * (S − 35) + 0.017D
dimana :
c = kecepatan suara (m/s)
T = temperatur (degrees Celsius)
S = salinitas (pro mille)
D = kedalaman
Daftar Pustaka
berapa harga alat echo sounder ini
BalasHapusechosounder bisa di manfaatkan untuk apa saja selain untuk penangkapan ikan?
BalasHapusmakasih infonya, secara garis besar berapa persen kapal penangkap ikan yang ada di indonesia yang menggunakan alat echo sounder ini?
BalasHapusnice info, pertanyaan saya apakah alat ini memiliki tingkat keakuratan yang tinggi? seberapa efisien kah jika dibandingkan alat lain (keunggulannya)?
BalasHapusmuhammad syafiq gumilang - 230210090007
BalasHapusapakah banyak dipakai di indonesia teknologi tersebut?
infonya bagus sekali, sehingga saya ada pertanyaan buat anda,echosounder dapat dilakukan untuk mengukur kedalam. pertanyaannya, dapat mengukur mencapai berapa kedalam? akurasinya terpercaya ga?
BalasHapusmau tanya nie..
BalasHapusadakah kekurangan dari alat echosounder?
trimz
apakah echosounder itu dapat memproses data / memberikan sinyal setelah menyentuh sesuatu (misal mengenai ikan jadi diketahui ada dimana ikan ts)?
BalasHapusDear fika:
BalasHapus"alasan mengapa echosounder dapat dimanfaatkan sebagai alat tangkap karena ikan ternyata
menghasilkan echo, dan kawanan ikan atau hewan lain dapat dikenali sebagai lapisan-lapisan sebaran dalam kolom air (Supangat, 2003)"
thank for question=)
Komentar ini telah dihapus oleh pengarang.
BalasHapusteruntuk
BalasHapusAyya:
"alat echosounder merupakan alat elektronik berbasic teknologi. idealnya untuk alat elektronik mempunyai kelemahan apabila alat tersebut rusak dan ada gangguan didalamnya. tapi tergantung seberapa lama alat tersebut bertahan".
M. Rizky:
"harga echosounder sekitaran jutaan atau bahkan puluh jutaan. harga bergantung pada distriboutor atau produsennya. kalo ada haraga dibawah itu tolong hubungi aku ya! hehehe"
abdulloh muhtar
"Echo-sounder komersil mempunyai lebar sinar 30-45o vertikal tetapi untuk aplikasi khusus (seperti pelacakan ikan atau kapal selam atau studi lanjut dasar laut) lebar sinar yang digunakan kurang 5o dan arahnya dapat divariasikan. Walaupun menunjukkan pengaruh temperatur, salinitas dan tekanan pada laju bunyi dalam air laut (1500 ms-1) relatif kecil. jadi untuk kedalaman sinyal bisa mencapai 1500 meter"
dear:
BalasHapusallan
"echosounder selain berfungsi untuk penangkapan ikan, alat ini berfungsi untuk mengukur kedalaman laut, benda apa saja yang terdapat didalam laut melalui suara."
kalau untuk mengukur pada kedangkalan 4 meter air, apa untuk tekanan dan segala macam bisa diabaikan?
BalasHapusfrek gelombang yang bisa mengukur jarak di air itu kira2 berapa ya frek nya?
Singlebeam echosounder dengan multibeam echosounder memiliki fungsi yang sama namun pancaran yang di pantulan berbeda. Nah alat yang membedakan pancaran tersebut itu apa?
BalasHapus